最後の90号まで到達したが... [週刊マイロボット]
案の定、76号からの拡張編は貧弱だった。主だった拡張としては、
・腕のオプションブロックの赤外線リモコン
・右腕に「手」を付ける拡張
・右腕に「手」を付ける拡張
といったところで、その他はブレッドボードでセンサー回路を組み立てるための電子部品が付いてくるだけだった。15号分としてはかなり貧弱だ。
しかも79号で途中まで組み立てた右腕の「手」は、10号分放置され89号でようやく完成している。継続購読を目論んだ姑息な進め方だ。つくづく一括セットで良かったと思う。毎週購読していたら2か月以上放置された毎号毎号怒りが湧いてきただろう。
しかも79号で途中まで組み立てた右腕の「手」は、10号分放置され89号でようやく完成している。継続購読を目論んだ姑息な進め方だ。つくづく一括セットで良かったと思う。毎週購読していたら2か月以上放置された毎号毎号怒りが湧いてきただろう。
88号には4枚目のCD-ROMが添付され、OSとプログラミング環境などが一新した。OSのインストールはジャンパーピンの接続が必要で、背中の一部を分解してようやくジャンパーピンを取り付けたら、なんと今回は不要だった。またしても早とちりで余分な苦労をしてしまった。しかしこのキットは多分にこのようなことが起きる。一度取り付けた部品を、後の号で取り外すことなど日常茶飯事で、あえて苦労させているような組み立てか所が多々あった。今回もそうだろうと思ってしまったが、手順がデタラメなキットだと組み立てる側の発想もゆがんでしまうのかも知れない。

ロビなどに比べ洗練さのかけらもない容姿だが、組み立てに1か月以上かかっているしそれなりに苦労したので愛着が湧いてきた。プログラミングもしてみたいところではある。とりあえずテストモードで動かしてみたら、右側の走行モーターの動きが悪い。直進できない。またもやトラブルのようだ。
先日のアームのエラーは、なんのことはないモーター側の電池が減ったのが原因だった。充電したらエラーは発生せず動きも問題ない。しかし、走行モーターに関してはそうではなさそうだ。動きが渋いので、どこか締めすぎているのか何かが接触して負荷になっているのかもしれない。いずれにしても分解が必要で気が重い。
先日のアームのエラーは、なんのことはないモーター側の電池が減ったのが原因だった。充電したらエラーは発生せず動きも問題ない。しかし、走行モーターに関してはそうではなさそうだ。動きが渋いので、どこか締めすぎているのか何かが接触して負荷になっているのかもしれない。いずれにしても分解が必要で気が重い。
ここまでの組み立てて少し飽きてきたので、間を開けてから再挑戦してみることになりそうだ。
<追記>
右側走行モーターの件だが、タイヤを外して締め直したら解決した。締めすぎて動きが渋くなっていただけのようだ。これで一安心して放置できる。
右側走行モーターの件だが、タイヤを外して締め直したら解決した。締めすぎて動きが渋くなっていただけのようだ。これで一安心して放置できる。
区切りとなる75号まで完了 [週刊マイロボット]
75号まで進み、一応の完成を見た。
週刊マイロボットは、当初75号までの予定だった。その後延長し90号まで続いた。マイ3Dプリンタもロボザックもそうだが、固定客が付いているのだから多少中途半端でも買い続けてくれるだろうという皮算用のようで、延長の内容は金額に見合っていないことが常だ。たぶんマイロボットも似たり寄ったりだろう。
ともあれ75号でこのように形にはなった。


けっこうデカイ。ロビやロボザックより2回りくらい大きい。ボディや頭部はそれほどではないのだが、走行を行う下半身は、タイヤも大きく車輪間隔も広い。机の上の気軽における大きさではない。
完成とは言っても起動すると右のアームのエラーが出る。たしかに初期動作がぎこちない。アームを取り付ける前はエラーにならなかったので、もしかしたらケーブルを挟み込んでいて動作に支障を来しているのかも知れない。分解して調べるしかない。
それから正面の電池ボックには、電子工作でおなじみのブレッドボードを貼り付けるようになっているが取り付けていない。光センサーら抵抗などの電子部品が少々と、配線用のリード線が多数付属していた。自分でセンサー回路などを組んで機能拡張しろということのようだ。ちゃちな電子工作には興味が湧かないのでブレッドボードの取り付けは見送った。
本機は音声認識によりある程度の制御もできるが、C言語などによるプログラミングがメインのようだ。Windows XPで動作するプログラミング環境が提供されているので、各種センサーの状態をもとにロボット動作を制御できる。しかし添付のCDにはサンプルらしきものが見当たらない。当時はサイトでサンプルを公開していたのだろうか。
一からプログラミングする気にもなれず、何やらロビやロボザック同様このまま保留してしまいそうな気配。そんことではいかんのだが。
Macの仮想環境にWindows XPをインストール [週刊マイロボット]
52号でブレインボードにOSを書き込むのだが、週刊マイロボットの対応OSはWindows XPだ。ロボザックはWin 7でもだましだまし使う方策はあったが、マイロボットでは見つからない。しかたなくMacの仮想環境Parallels Desktopにインストールすることにした。


インストール自体は非常に簡単でParallelsのメニューにしたがうだけで30分程度で終わった。しかし
・ライセンス認証ができない
・Windows Updateができない
・Windows Updateができない
などの問題が発生。
ネットは一応つながるのだが、WEBが開けない。Parallesでハードウェア構成(メモリサイズ、CPUのコア数など)をいじっても改善せず、再インストールを試みるもダメ。Parallesの問題かと思い、Virtual Boxを試すも同じ症状。よくよく調べると、ここ数年でセキュリティ向上のため各WEBサイトで暗号化方式を一斉に変更し、XP標準のIE6では対応し切れていないことが分かった。
もう一回インストールし、こちらのサイトの情報をもとにSP3、IE8をインストールしたら、ライセンス認証もWindows Updateもできた。結局4回もインストールする羽目になったが動作して良かった。とは言えまだ完全ではないが、マイロボットを動作させるには十分だろう。いずれロボザックの環境もXP側に移すことにする。
と言うわけで今日はここまで。
製作再開、52号まで一応終了 [週刊マイロボット]
半月ほど間が空いてしまったが、デアゴスティーニ「週刊マイロボット」の製作を再開した。
着手したものの「パーツの確認」と称した先送りが連続して、7号ほど貯まってようやく製作開始できた。ロビやロボザックでも先送りはあったが、ここまで連続したことはなかった。毎週購入していた方は、約1ヶ月半おあずけを食らったことになる。


48号、49号で一気に腰部分をくみ上げ、下半身がほぼ出来上がった。作りかけの各ブロックもまとまり、かなりスッキリした。


この組み立てには一つ難点があった。腰部を上下させるギアボックスにおいて、上下動をまかなうステーの位置が適切でないと組み立てができないことだ。多数のギアを経由しているのでステーを直接動かすことができない。モーターを回す必要がある。
そこで頭部の制御で最初に使っていた電池ボックスと制御基板を用意し、モーターのコネクタを基板裏のコネクタピンに押し当てることでモーターを回転させた。
そこで頭部の制御で最初に使っていた電池ボックスと制御基板を用意し、モーターのコネクタを基板裏のコネクタピンに押し当てることでモーターを回転させた。
以前に何回か回転テストを行うとき、この手を使っていた。同じ事をしたまでで慣れていたから良かったが、この手法を思いつかなかった当時の方々は途方に暮れたかも知れない。最悪ギアボックスを分解してギアの位置を調整するなどしたかも知れない。しかしギア位置調整で、ステーを適切な位置に合わせるのはかなり難しかっただろう。
52号で「ブレインボード」と呼ばれる本ロボットのコアとなるボードを取り付けたが、OSのインストールなどが必要らしい。それには50号付属のCD-ROMを利用するのだが、例によってこのセットもWindows XP対応だ。Windows 7での実績が見当たらなかったし、36号付属CD-ROMのアプリケーションも挙動が怪しかったので、思い切ってWindows XPをMacの仮想環境にインストールすることにした。大ごとなので後日行うことにして本日はおしまいとした。
41号まで進むも作りかけばかり [週刊マイロボット]
41号まで進んだ。しかしいろいろ問題は多い。
38号で音声ボードを取り付けた。これにより、
・マイクからの音声入力に応答
・スピーカーから音声を出力
・スピーカーから音声を出力
が可能になる。
しかし、単純な音声コマンド「こんにちは」「ありがとう」などでも反応しない。発声方法や音量や距離など変えても無反応だ。先達達のサイトを見るに、意外に反応するとか、コツをつかむまでが大変だなどとあるが、本機のようにまったく無反応という例はなかった(3〜4サイトだけだが)。
しかし、単純な音声コマンド「こんにちは」「ありがとう」などでも反応しない。発声方法や音量や距離など変えても無反応だ。先達達のサイトを見るに、意外に反応するとか、コツをつかむまでが大変だなどとあるが、本機のようにまったく無反応という例はなかった(3〜4サイトだけだが)。
マイクの配線確認やマイク出力の波形観測も行ってみた。一見問題なさそうだ。さらにLEDの点滅を見るに完全に無反応なわけではなく、認識が不完全のようでもある。後の号で、音声コマンドの認識レベルを変更できるようになるらしいので、それを待つことにして先に進めた。
41号ではベアリングを作成。こんなものまで作るのだ。荷重がかかる部分らしく摩擦抵抗をできるだけ減らそうという目的のようだ。しかし既存のベアリング部品を使わないのはなぜだろうか。ベアリング玉の方がコストダウンできると言うことか。


41号までの製作物を並べてみるとこの通り。製作途上の先送りが多いので、このように中途半端なブロックだらけになってしまっている。管理人の場合は全号セットを一気に作成しているから良いが、毎週毎週この状態では、保管最中に紛失や破損の懸念が大いにある。なにせ数ヶ月間、この状態が続くのだから。


やはりロボザックやロビとは大違いで、開発国イタリアとのお国柄の違いを感じてしまった。
27号まで終了 [週刊マイロボット]
割と順調に27号まで進んだ。17号までで首の2つのモータブロックを含む頭部が完成。頭部には新しいロジックボードがあり、複数のマイク入力による音声の方向を検出できるようになった。これにより
・頭をなでるとうなずく
・音がした方に顔を向ける
・音がした方に顔を向ける
などの動作ができるようになった。


その後両腕のモータブロックを作成。すべてのモータブロックには、
・減速のためのギア列
・回転角を検出するオプティカルエンコーダ
・回転角を検出するオプティカルエンコーダ
があり、これらをすべて組んでいく。おのずと構造は大きくなってしまう。こんな構造なので全体で7自由度しかない。ロビやロボザックのようにサーボモータを使えばより小型で洗練されたロボットになったのだろうけど、内部構成を理解しながら作るのも悪くない。
その後、せっかく組み立てたボディを分解して(相変わらず洗練されていないが)LCDパネルやスイッチなど取り付け、27号でこんな状態になった。
 配線だらけで組み立てているのか分解しているのかわからない状態だ。ちなみに次号では新たなロジックボードにこれらの信号線を接続するらしい。
配線だらけで組み立てているのか分解しているのかわからない状態だ。ちなみに次号では新たなロジックボードにこれらの信号線を接続するらしい。
 配線だらけで組み立てているのか分解しているのかわからない状態だ。ちなみに次号では新たなロジックボードにこれらの信号線を接続するらしい。
配線だらけで組み立てているのか分解しているのかわからない状態だ。ちなみに次号では新たなロジックボードにこれらの信号線を接続するらしい。14号まで完了 [週刊マイロボット]
区切りとなる14号まで出来上がった。購入したメインのセットが14号まで作成途上だったので、これに追いついたと言うことで心持ち区切りとなった。
まず最初に納品されたプーリーベルトを使って7〜9号の首用モーターボックスを作成。Oリングと呼ばれるパッキン等に使う輪ゴムだが、これをプーリーベルトに流用しているようだ。オリジナル品に比べ太さは同一だと思うが径がやや小さめだったかもかも知れない。ゴムなので伸びるので良しとした。

グリスも不足していると思ったので別途購入した。後で気づいたが7号に小袋に入ったグリスが付いてきたので購入する必要なかった。12年も前の品なので劣化している懸念もあるので無駄ではない。
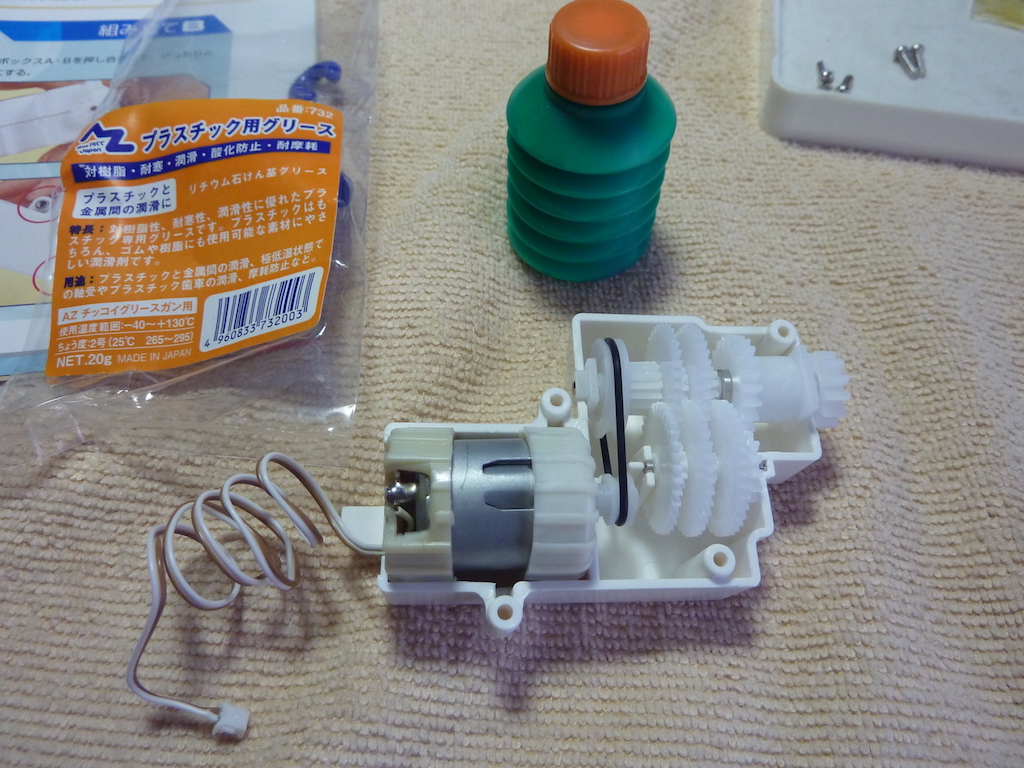
グリスも不足していると思ったので別途購入した。後で気づいたが7号に小袋に入ったグリスが付いてきたので購入する必要なかった。12年も前の品なので劣化している懸念もあるので無駄ではない。
そして14号まで完成。


プラスチック部品は若干精度が出ていないようで、電池ボックスから出ている信号コネクタ(ピンヘッダ)がだいぶ偏っている。たぶん干渉してボックスヘッダが接続できないだろう。たぶんヤスリなどで削ることになろうかと思うので、電池ボックスをどこかに取り付ける前に調べて対策しておいた方が良さそうだ。先達達のブログを参考にするのも良いかも知れない。
ピニオンギア納品され、ようやく6号まで完了 [週刊マイロボット]
早くもピニオンギアが納品された。家電量販店で見つけたタミヤのセットで130円ほど。貯まったポイントで購入し配送料無料だった。タダで届けてもらった気分で何やら申し訳ない。
同一物だった。子供のころ数多く作成したプラモの知識が役に立った。マブチモーターには非常にお世話になり、このピニオンギアは何度使ったことか。取り付け時は小型の金槌を使い、外すときは焼いて溶かしてペンチでつまんで取るのが常套手段だった。今回はグリスが効いていたせいもあり、手で押し込むだけで取り付けられた。


そして6号まで完成。頭をなでると目を光らせながら下を向き、もう一度なでると元に戻る。頭の頂点に静電センサーのための電極代わりの基板があるのだが、電池の電源電圧が下がると感度もかなり下がるようだ。そこでアルミ箔を添えると感度が上げられるとのことで試したらうまくいった。


さらに進めたいところだが、7号のプーリーベルトを流用してしまったので、代替品が納品されるまで待つしかない。と言っても2〜3日だが。
やはり問題発生するも解決したら別の大問題発覚 [週刊マイロボット]
いよいよ週刊マイロボットの製作に取りかかった。どのキットもそうだが、最初のうちは細かいトラブルに見舞われる。後から思い出すと些細なことだが、そのキットの「性質」に慣れるまではちょっとしたことでつまずく。しかし今回はそれだけではすまなかった。
今回のセットは組み立て済みが混在で、3号〜4号の分は取り外して使う。その3号は首の縦方向回転のモータとギア、およびオプティカルエンコーダなどで構成された1つのブロックであり、全巻を通じても特にパーツが多い号らしい。念のため分解してみた。
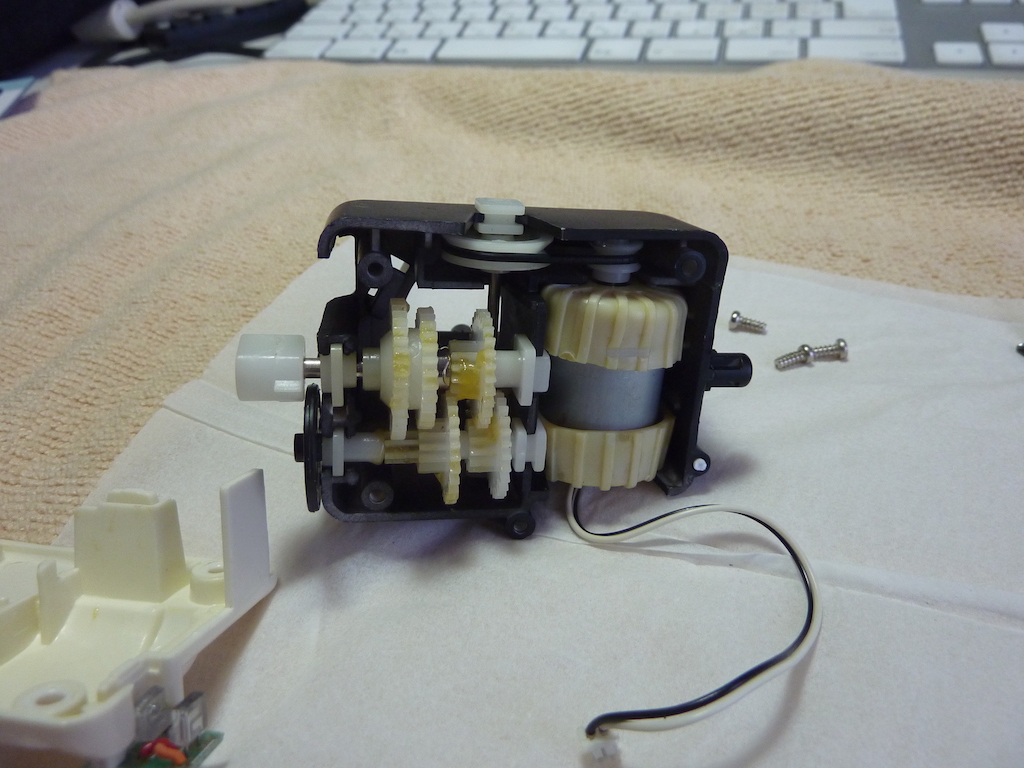
グリスがべっとり付着している。しかも偏って塗られている。余分と思われる部分は拭き取った。モータからの初段はプーリーを使って駆動している。過負荷時にベルトがスリップすることでモータの加熱や駆動側の過電流を防ぐためらしい。このベルトがかなり緩く、ちょっと気になる。
その後4号もパーツを流用し、5号〜6号と製作して頭部が一応完成した。電池を入れ頭部の静電センサーに触れると、目の部分のLEDが光り頭部が下を向くはずだ。しかし動かない。光りもしない。分解して配線を調べ、電池を新品にしたり各部の電圧を測ったりもしたがそれらしい部分は見当たらない。モータのブロックを外して電池を直結してみたら問題なく回転する。そうこうしているうちに電池ブロックのコネクタのプラス側が緩んでいることに気づいた。差し込んだら動いた。目も光り、仕様通りに動いているようだ。


しかしモータの動きを見ると少し妙だ。オプティカルエンコーダがスムーズに回転していない。回転しないときもある。この影響かモータの静止位置が正確でなく、このまま組み立てても正しい位置で頭が停止しなくなる。モータブロックを再度分解してよくよく見ると、小さいピニオンギアにヒビが入っていた。軸に固定されず空回りすることがあり、結果的にオプティカルエンコーダも回らなくなる。
このピニオンギアは、プラモデルのマブチモーターに最初に取り付けるヤツとよく似ている。たぶん同じだが、プラモを組んでいたのは遠い昔なのでピニオンギアの手持ちはない。おまけにプーリーベルトもヒビが入っていて断裂するのも時間の問題だ。
3号を入手できればそれにこしたことはないが、これだけパーツの多い号はトラブルの対象となりやすく需要も多そうだ。オークションやフリマサイトを見たが、この号の出品物はない。ネットでそれらしいギアやプーリーベルトを見つけたので発注した。
納品されるまで製作はお預けだ。しかし様々な問題に遭遇したおかげで、いろいろなサイトを見る機会があり、今後の製作での注意点も分かった。そういう意味では早い段階での問題遭遇は決して悪いことではない。
またまた購入するも「安物買いの銭失い」に [週刊マイロボット]
以前から目を付けていたデアゴスティーニの組み立てものに「週刊マイロボット」がある。いわゆるインテリジェントロボットで、音声やカメラ画像入力に反応して自律動作する。PCでのプログラミングも可能だ。しかしロビほどの可愛さはなく、可動部分も少ないのでそれほど魅力を感じていなかった。最近では出物も少なく、あっても想定範囲を超えた額になってしまうので様子見をしていたが、今回の品は途中組み立て済みなので安めに落札できた。
全90号のうち14号まで作成済み。未開封が多いので送料もかかるが、送料とほぼ同額という低価格で落札できたので非常にラッキーだと思えた。

しかし納品されて各冊子の組み立て説明と、添付されている組み立て済みのパーツを照らし合わせてみたら、以下の欠品があった。
・7号〜9号で作成する「首のモーターボックス」一式
・10号添付で後の号で使う「サウンド追跡モジュール用ステー」
・10号添付で後の号で使う「サウンド追跡モジュール用ステー」
典型的な「安物買いの銭失い」だった。オークションでの応札がやけに少ないと思ったのはそのせいだった。2006年刊行なのでデアゴスティーニのサイトには詳しい情報はない。しかし製作した方のサイトがいくつか残っており、その経過と出品物の写真を照らし合わせれば欠品には気づいたはずである。出品物の説明には「ジャンク」「欠品の保証なし」とあったので、出品側の責はない。全部あるだろうと思い込んだこちらが悪いのだ。
途方に暮れて他のフリマサイトを見たら、欠品した号を補填できる組み合わせが出品されていた。冊子とパーツのみの発送で可(箱から出して容積を減らす)の条件で値引きしてもらい購入できた。これだけで十分だったが、さらにオークションで2つの号を補充して、結局3〜4号以外の88号分は新品にすることが出来た。
総額ではだいぶかかってしまい、このセットに対する想定価格に対し数千円余分に要したが、勉強代と割り切ることにした。今回の痛手が「デアゴスティーニ依存症」を脱却するための第一歩となれば幸いだ。


